|
 |
 |
 |
|
Home > Systeme > Gesamtdemonstrator
|
|||||||||||||||||||||||||||||
 Gesamtdemonstrator
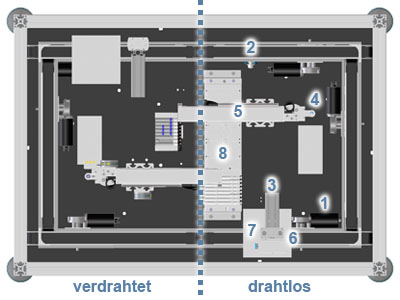
GesamtdemonstratorDie wesentlichen Funktionen der im EnAS-Projekt erarbeiteten Teilsysteme und Komponenten wurden in einem anwendungsnahen Gesamtdemonstrator umgesetzt und erprobt. Der Demonstrator zeigt an einem praktischen Beispiel die Funktionsweise der neu entwickelten Sensoren und Aktoren in einer Anlage und deren Einbindung in ein übergeordnetes Steuerungskonzept. In einer einfachen Montageanlage werden kleine Dosen zunächst geöffnet, mit einem Objekt gefüllt und anschließend wieder geschlossen. Der Transport der Dosen erfolgt über ein umlaufendes Förderband. Damit ein endloser Kreislauf demonstriert werden kann, ist die Förderstrecke in sich geschlossen. Der linke Teil des Demonstrators enthält grundsätzlich die gleichen Bauteile und Funktionen wie der rechte Teil, der Kreisprozess ist demnach punktsymmetrisch. Der Unterschied zwischen linker und rechter Seite besteht in der praktischen Ausführung der Komponenten. Während im linken Teil konventionelle Handhabungs- und Sensortechnik verwendet wurde, sind im rechten Teil hauptsächlich neu entwickelte drahtlose Komponenten verbaut. Der Demonstrator bietet somit die Möglichkeit des direkten Vergleichs von konventioneller und Wireless-Technologie. Jede einzelne der Wireless-Komponenten wird vor Ort aus der Umgebung mit elektrischer Energie versorgt, beispielsweise über Solarzellen, die vor Ort verfügbare Druckluft, oder die Bewegung des Förderbands. Die drahtlose Kommunikation wird zum einen in einer echtzeitfähigen Übertragung mit geringer, definierter Reaktionszeit und zum anderen mit niedrigem Energieverbrauch und hoher Reichweite realisiert. Das dezentrale und flexible Steuerungskonzept, die funkgestützte Signalübertragung sowie die autarke Energieversorgung der einzelnen Komponenten, ermöglichen die weitgehend unabhängige Funktion einzelner Komponenten, drahtlose Überwachungs- und Dignosefunktionen sowie den einfachen Austausch einzelner Komponenten im System. |
|||||||||||||||||||||||||||||
 Layout des Demonstrators
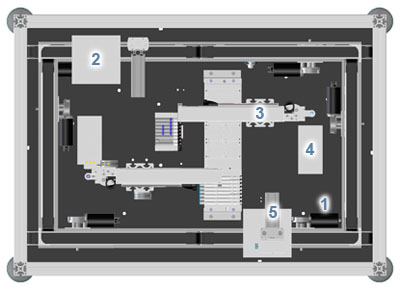
Layout des DemonstratorsDen äußeren Rahmen des Demonstrators bildet das Förderband, auf dem mehrere Objektträger transportiert werden. Angetrieben werden die einzelnen Förderbandabschnitte über jeweils einen Elektromotor (1). Der Objektträger (2) bewegt sich im Uhrzeigersinn um den Demonstrator und wird an den diversen Belade- und Entladestationen durch gezieltes An- und Abschalten der Förderbandabschnitte gestoppt. Soll eine der transportierten Dosen auf einem Objektträger beladen werden, so wird der Objektträger unter dem Y-Z-Handlingsystem (3) angehalten. Dieses besteht aus einem horizontalen und einem vertikalen pneumatischen Antrieb sowie einem Sauger zum Greifen der Objekte und der einzelnen Deckel der Dosen. Die Zuführung von weiteren Dosen wird über einen Querschlitten (4) symbolisiert, der jeweils eine Dose in den Greifbereich des Handlingsystems einbringt oder sie von dort wieder entfernt. Im Anschluss wird der Objektträger auf den Förderbändern weiter transportiert und erreicht die Greiferstation (5), bestehend aus einem Hubzylinder und einem pneumatischen Greifer. Der Hubzylinder bringt den Greifer in die korrekte Position, der Greifer schließt daraufhin die Dose. Der Objektträger setzt anschließend seinen Weg fort. Auf der gegenüberliegenden Seite des Demonstrators wird der soeben beschriebene Vorgang wieder rückgängig gemacht, sodass Dose und Objekt in ihrem ursprünglichen Zustand nach einem Umlauf erneut an Beladestation und Deckelstation ankommen. |
|||||||||||||||||||||||||||||
Der Demonstrator ist weitgehend punktsymmetrisch aufgebaut. Für die linke Seite wurden herkömmliche drahtgebundene Komponenten verwendet, die rechte Seite zeigt die Funktionen von energieautarken Sensoren und Aktoren, die innerhalb des EnAS-Projekts entwickelt wurden. Die Position der einzelnene Komponenten ist im Bild auf der rechten Seite dargestellt. Durch Berührung mit dem Mauszeiger erhalten Sie ein Detailfoto des jeweiligen Objekts.
Zur Überwachung der aktuellen Temperatur eines Förderbandmotors, wurde ein Wireless-Temperatursensor angebracht. Die Stromversorgung erfolgt über eine Solarzelle. Ein Rotationssensor ist über eine Andruckrolle mit dem Förderband verbunden. Sobald die Bewegung des Förderbands gestört ist, beispielsweise durch einen Abriss des Bandmaterials, meldet der Rotationssensor ein Fehlersignal. Die Stromversorgung des Sensors erfolgt aus der Bewegung des Förderbands selbst. Die Rotation der Andruckrolle wird an einen Generator übertragen. Dieser erzeugt die nötige elektrische Energie, um das Diagnosesignal senden zu können. Der Druck im Gesamtsystem wird über einen Wireless-Drucksensor erfasst. Ebenso wie für den Temperatursensor (1) wird die elektrische Energie zur Versorgung des Drucksensors über eine Solarzelle bereitgestellt. Ein weiterer Drucksensor überwacht den Druck im Vakuumsauger während des Greifvorgangs. Dieser Druck gibt Aufschluss darüber, ob das Objekt korrekt gegriffen wurde. Die Energie zur Versorgung des Drucksensors wird aus der System-Druckluft gewonnen. Wird am Sauggreifer ein Greifvorgang eingeleitet, so ändert sich gleichzeitig der Druck in einer dafür vorgesehenen Membran-Dose. Die Verformung der Membran wird an ein Piezoelement übertragen, in dem eine Ladungsverschiebung eine ausreichende Menge elektrischer Energie erzeugt. Die Ein- und Ausfahrbewegung des Y-Z-Handlingsystems wird über zwei Endschalter überwacht. Jeweils beim Erreichen einer der beiden Endpositionen wird ein entsprechendes Signal gefunkt. Die Bewegungszeit kann dann von der übergeordneten Steuerung bestimmt und zu Diagnosezwecken verarbeitet werden. Die benötigte Energie wird ebenso wie bei der Überwachung des Saugdrucks über eine Membran-Dose und ein integriertes Piezoelement erzeugt. Die Anwesenheit der Werkstücke auf dem Objektträger muss ebenfalls überwacht werden, denn Greifvorgänge und Schließvorgänge an den Dosen sollen von der Steuerung nur dann eingeleitet werden, wenn wirklich ein Objekt vorhanden ist. Zu diesem Zweck ist der Objektträger mit mehreren optischen Sensoren ausgestattet. Die Energieversorgung dieser Sensoren wird über eine Solarzelle am Rand des Objektträgers realisiert. Der Aktor zum Schließen der Deckel wird von einem pneumatischen Greifsystem gebildet, welches durch seitlichen Druck auf den Dosendeckel die Dose verschließt. Die Energie zur Umsetzung des Greifprozesses wird komplett aus der verwendeten Druckluft gewonnen. Zur Versorgung der elektrischen Komponenten wären herkömmliche Verfahren wie Solarzellen oder Piezowandler nicht ausreichend. Daher wurde ein Motor-Generator-System integriert. Im Motor wird pneumatische Energie in Form von Druck und Stömung in Rotationsenergie gewandelt. Diese wird anschließend in einem Generator über elektromagnetische Induktion zur Ergeugung elektrischer Energie benutzt - ähnlich wie in Kraftwerken. Ebenso wie alle anderen Wireless-Komponenten des Demonstrators, soll auch die pneumatische Ventilinsel weder mit äußerer elektrischer Energie, noch mit drahtgebundenen Signalen versorgt werden. Daher enthält die verwendete Ventilinsel einige zusätzliche Module, die ähnlich wie im monoenergetischen Greifer den Betrieb mit ausschließlich Druckluft ermöglichen. In einem Energiewandlermodul wird in einem pneumatischen Motor mechanische Energie in Form von Rotation erzeugt. Diese wird anschließend in einem Generator in elektrische Energie gewandelt. Zur temporären Speicherung der elektrischen Energie wird über ein Energiemanagement-Modul ein Akkumulator geladen. Ein Funkmodul ermöglicht die Kommunikation von Ventilinsel und übergeordneter Steuerung. |
|||||||||||||||||||||||||||||
|
Video-Clips Hier haben Sie die Möglichkeit, den Demonstrator in Aktion zu sehen. In den hier abrufbaren Videoclips werden die einzelnen EnAS-Komponenten des Demonstrators kurz gezeigt nd die Funktionsweise vorgestellt. Nutzen Sie zum Abruf am besten die folgenden Verknüpfungen zu Youtube. Natürlich lassen sich die Clips auch herunterladen - benutzen Sie hierfür bitte die weiter unten folgenden Links. Das Video kann in zwei Versionen angesehen werden, entweder mit erklärender Beschriftung (links), oder ohne Beschriftungen (rechts). Weitere Infos und Downloads Hier können Sie einige Dateien und insbesondere das Video vom EnAS-Demonstrator in diversen Versionen herunterladen. Unter "Typ" ist der jeweils verwendete Codec angegeben.
|
|||||||||||||||||||||||||||||
| Das beschriebene Vorhaben wird mit Mitteln des Bundesministeriums für Wirtschaft und Arbeit unter dem Förderkennzeichen 01 MG 502 bis 506 gefördert. Die Verantwortung für den Inhalt des Internetauftritts liegt bei den Autoren. © EnAS | |||||||||||||||||||||||||||||